



CiberToque: Digitalização da arte humana
Em declarações ao COMPETE 2020, Manuel João Ferreira, Head of Research da Neadvance, falou da importância do apoio dos Fundos Europeus, dos objetivos do projeto e das suas actividades:
 Manuel Ferreira | Head of Research - Neadvance
Manuel Ferreira | Head of Research - Neadvance"Num cenário dominado pela tendência vertiginosa de evolução tecnológica, a inovação é a palavra de ordem para a capacidade e sucesso na introdução de novos produtos no mercado. Neste contexto de dinâmica, com tradução socioeconómica, a sustentabilidade dos novos produtos e soluções, a médio e longo prazo, depende em larga escala da capacidade de investimento em I&D.
O contributo do financiamento do COMPETE 2020 é peça-chave para um paradigma de crescimento continuo, resiliente e sustentado pelos novos produtos. Este programa de financiamento foi, pois, essencial para a concretização do projeto CIBERTOQUE, alavancando a visão inovadora de uma economia em acelerada transição.
O Objetivo do Projeto
O projeto CIBERTOQUE teve como objetivo geral a conceção de um sistema modular inteligente que permita adaptar e automatizar soluções industriais robóticas da indústria automóvel, que atualmente ainda se encontram dependentes de intervenção humana, derivadas da necessidade da sensibilidade, toque e flexibilidade do ser humano.
Este sistema, devido à sua natureza modular e elevado nível de abstração, apresenta uma integração facilitada no contexto mais recente de Fábricas Digitais e Indústria 4.0, estando assente na premissa de digitalização da arte humana, i.e., a criação da entidade virtual do sistema robótico, que quando conectado ao controlador real, replicará a perícia humana.
Como vetores de investigação e inovação principais pode destacar-se:
- Desenvolvimento de um sistema de monitorização humana que permitiu adquirir demonstrações da execução de tarefas por operadores especializados, possibilitando uma caracterização detalhada e fidedigna dos pormenores relevantes para a replicação da perícia humana.
- Desenvolvimento de um módulo de tradução de movimentos humano-robot, que permitiu mapear as atuações da demonstração do operador e o controlo do sistema robótico, a um nível de abstração elevado.
- Desenvolvimento de um sistema de robótica inteligente, com base na solução proposta de sistema modular, que permitiu a replicação robotizada da perícia humana na execução de processos industriais típicos, caracterizados por sequências de operações não fixas, movimentos gerais e prolongados (nível macro do processo).
- Desenvolvimento experimental do conceito de aprendizagem e adaptação automática dos sistemas robóticos às variações nos processos industriais, a partir de demonstrações. Para este conceito, algoritmos de Inteligência Artificial serão aplicados de forma a extrair e generalizar conhecimento a partir das demonstrações iniciais, aperfeiçoando e melhorando o comportamento aprendido.
Resumo das atividades
No módulo de controlo robótico, os resultados obtidos do módulo da tradução de movimentos são aplicados no respetivo controlo do sistema robótico, assente numa camada de abstração que permite a aplicação dos movimentos traduzidos em diversos tipos de sistemas robóticos.
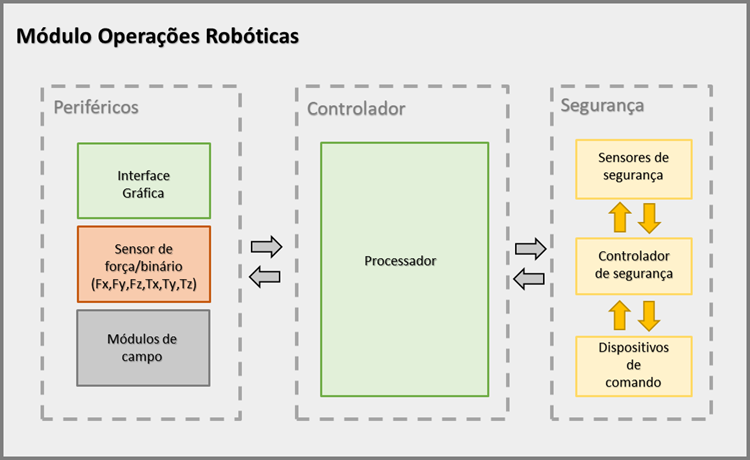
Com base na solução proposta no âmbito deste projeto, definiu-se, entre outros, o objetivo de investigar e desenvolver um módulo de controlo do sistema robótico, a um nível de abstração e segurança elevado, que permita a obtenção de um mapeamento generalizado consoante as especificidades do processo em questão e do sistema robótico a utilizar.
Definiu-se a arquitetura representada na Figura 1 para o módulo, que permite controlar o sistema robótico e ao mesmo tempo dotá-lo das ferramentas necessárias para a execução das tarefas (garras, sensores, apoios e outros) e em simultâneo assegurar a segurança das pessoas.
Fig. 1 – Arquitetura do Módulo
De modo a responder aos dois casos de estudo foram desenvolvidos dois protótipos laboratoriais representados na Figura 2 . O protótipo da esquerda para o caso da deteção de defeitos em pintura, onde o braço robótico faz um seguimento do perfil da porta, através do controlo da força exercida.
E protótipo da direita para a assemblagem de cabos, neste o braço robótico captura as fichas dos cabos e desloca-as paras as posições de assemblagem.
Fig. 2 – Protótipo Laboratorial
A assemblagem dos cabos é feita com o recurso a um sistema auxiliar, desenvolvido para garantir a posição dos cabos. Com o objetivo de remover alguma complexidade, ao sistema de monotorização e aos próprios movimentos do braço robótico.
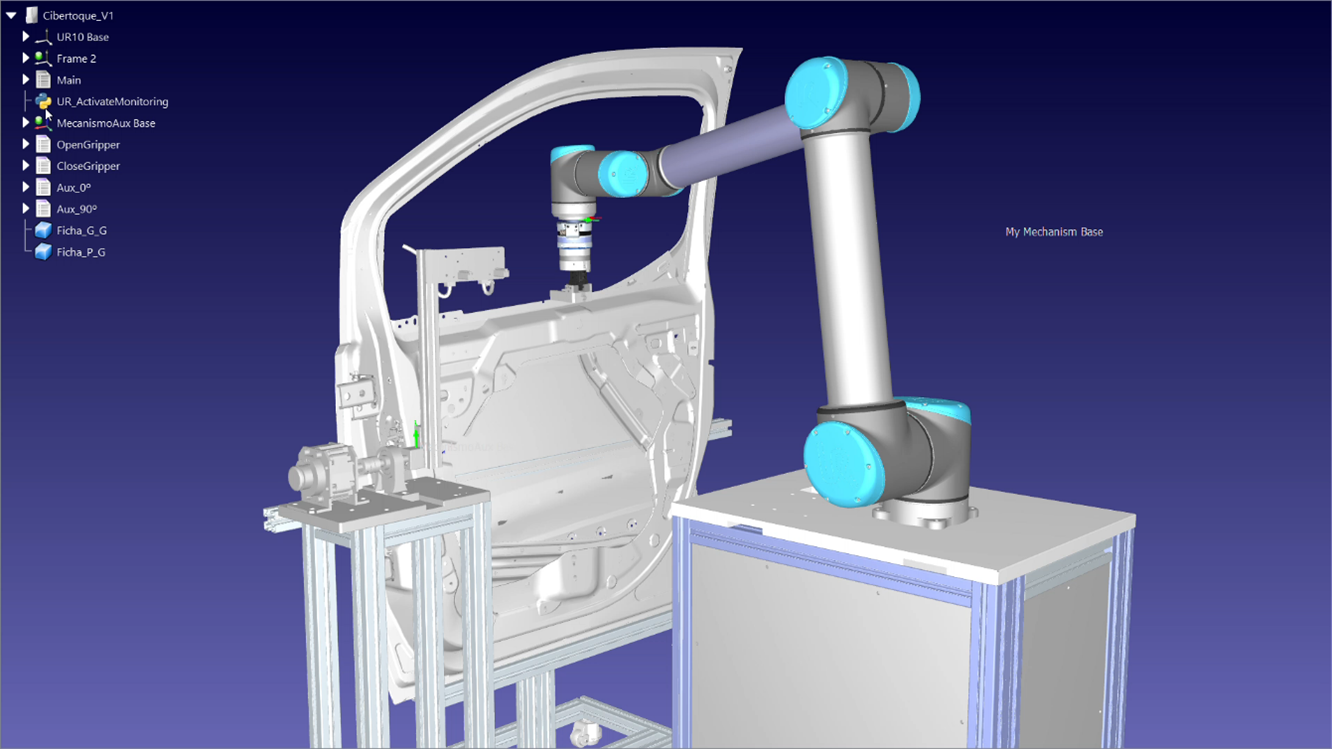
Os movimentos do braço robótico e do sistema auxiliar foram previamente testados em ambiente simulado como mostra Figura 3.
Fig. 3 – Simulador

O Apoio do COMPETE 2020
O projeto é promovido pela Neadvance Machine Vision em consórcio com a 4iTec Lusitânia, a Universidade do Porto e a Centimfe e é cofinanciado pelo COMPETE 2020 no âmbito do Sistema de Incentivos à Investigação e Desenvolvimento Tecnológico (Copromoção, Clube Fornecedores), envolvendo um investimento elegível de 885 mil euros, que resultou num incentivo FEDER de cerca de 639 mil euros.
Links
Neadvance | Website
4iTec Lusitânia | Website
Universidade do Porto | Website
Centimfe | Website