



Projeto IntVIS4Insp
2. Testemunho de Manuel João Ferreira, CTO da Neadvance

2.1 Enquadramento/motivação
Após um período de estagnação e de desindustrialização, a Europa encontra-se agora num processo de mudança apostando numa forte e assertiva reindustrialização.
O documento designado por “O Conceito de Reindustrialização, Indústria 4.0 e Política Industrial para o Século XXI – O Caso Português”, produzido pelo Conselho da Indústria Portuguesa da CIP, refere que “Sem indústria (e sem serviços ligados ao sector industrial), a economia perde a sua capacidade de inovação e não consegue criar empregos qualificados, nem superar os choques, quaisquer que eles sejam”.
Esta nova visão da Europa, e em particular de Portugal, origina novos desafios industriais que permitem lidar com uma elevada produtividade e variedade de produtos, e, simultaneamente, estarem assentes numa produção em pequena escala com a criação de produtos à medida e customizados ao cliente final. De acordo com este novo paradigma, a industrialização depende de uma elevada adaptabilidade dos processos produtivos, de uma cadeia de valor e produtiva (conetividade e interligação entre recursos) 100% digital.
Este novo conceito de (re)industrialização está tipificado na Indústria 4.0. Este conceito reflete a tendência atual da automação e da troca de dados nas tecnologias produtivas. O princípio básico assenta na criação de redes inteligentes ao longo de toda a cadeia de valor (através da ligação de máquinas, de peças de trabalho e de sistemas) que se podem controlar umas às outras de forma autónoma. A Indústria 4.0 tem como estratégia subjacente a elevada customização do produto, produzido em massa, e recorrendo a um processo produtivo com elevada capacidade de flexibilização. Esta estratégia está a ser implementada nos processos produtivos através de métodos de auto-otimização, autoconfiguração e autodiagnóstico, associado a processos cognitivos de suporte aos trabalhadores, surgindo assim, o conceito de “Operador 4.0” que está a facilitar o papel dos trabalhadores mediante a criação de novas formas de interação entre estes e as máquinas. Alguns exemplos aplicacionais da Indústria 4.0 são máquinas que podem prever falhas e acionar processos de manutenção de forma autónoma, ou processos de logística auto-organizados, que reagem a mudanças inesperadas na produção.
Em contraste com as fábricas tradicionais, numa fábrica no conceito Indústria 4.0, para além da monitorização dos processos produtivos e do diagnóstico de falhas, os componentes e sistemas serão capazes de obter autoconsciência e auto-predição, fornecendo ao gestor mais informações sobre o estado da fábrica. Para além disto, a fusão de informações acerca da qualidade dos distintos componentes, fornece uma previsão de integridade precisa ao nível dos componentes e dos sistemas permitindo realizar uma eventual manutenção no tempo preciso tendendo para zero paragens.
Os avanços tecnológicos na área de visão por computador têm conduzido a uma maior capacidade de deteção e compreensão de estruturas visuais o que, combinado com sistemas em tempo real, permite disponibilizar ferramentas computacionais de inspeção que se aproximam e, por vezes, até superam os sentidos humanos. Estas ferramentas possuem aplicações em diversos domínios de interesse da sociedade moderna desde a automação industrial (por exemplo, teste e controlo de qualidade de produtos finais) até à medicina (por exemplo, sistemas de apoio a diagnóstico). As aplicações ao nível da manipulação de objetos recorrem frequentemente a sistemas robotizados que por sua vez são guiados por sistemas de visão por computador, no sentido de flexibilizar as operações previamente definidas.
Numa perspetiva alargada do conceito de visão por computador, esta parte dos algoritmos de processamento e análise de imagem, incorpora também as mais avançadas técnicas de inteligência artificial. Estes sistemas capacitam, cada vez mais, o computador a simular a visão humana em processos de avaliação da qualidade em linhas de produção, possibilitando maiores eficiências e tempos inferiores aos obtidos por um operador humano. Da mesma forma, estes sistemas conduzem a ganhos muito significativos, quando comparados com outros mecanismos convencionais. A sua aplicabilidade, cada vez mais abrangente, tende a focar-se em objetos de elevada complexidade (especulares; texturados; geometria tridimensional de elevada complexidade; características visuais visíveis com a manipulação), e com requisitos de inspeção, qualidade e deteção de características com limiares mais apertados.
Este projeto consorciou os parceiros NEADVANCE, o CCG e a Universidade do Minho que combinam as suas competências e elevado know-how para desenvolver atividades de I&DT ao nível de processos disruptivos de aquisição de materiais/componentes e produtos acabados e ao nível dos algoritmos de inspeção recorrendo a técnicas de processamento e análise de imagem e inteligência artificial.
O consórcio posiciona-se, pois, no contexto da inspeção de objetos com elevado grau de complexidade (com características visuais realçadas sobre manipulação), operações produtivas mais complexas e cada vez mais flexíveis e com elevado grau de adaptabilidade.
Objetivos tecnológicos atingidos
O IntVIS4Insp pretendeu conceber, desenvolver e demonstrar novos conceitos de flexibilidade e adaptabilidade para as áreas de inspeção automática recorrendo à manipulação de objetos, através de tecnologias de visão por computador, inteligência artificial e robótica. Em específico, esta proposta visou o desenvolvimento de tecnologias de inspeção visual para objetos cujas características obriguem à sua manipulação, ou à manipulação dos sistemas de aquisição. Fatores como o tipo de produto a inspecionar, o meio envolvente onde este se encontra, a distância ao sistema de inspeção, a iluminação, os ângulos de análise, entre outros, refletem-se em necessidades metodológicas e técnicas específicas de cada sistema, sendo necessário aplicar vários paradigmas de aquisição e de processamento de imagem.
Neste sentido, o presente projeto teve como objetivos tecnológicos principais:
> Desenhar uma plataforma de aquisição de imagem flexível e adaptável aos requisitos do processo de inspeção, no que concerne à taxa de aquisição de imagens, bem como, às diversas alternativas de HW e protocolos de aquisição.
> Desenvolver uma plataforma de ferramentas genéricas de processamento e análise de imagem de base (2D e 3D) e inteligência artificial que possam ser disponibilizadas para a inspeção automática aplicada a distintos objetos.
> Desenvolver ferramentas de visão por computador dedicadas à extração de informação tridimensional dos objetos com vista a incrementar a flexibilidade dos sistemas robotizados.
> Desenvolver um sistema robotizado de manipulação bimanual para apoio à inspeção de objetos complexos, em conjunto com o sistema de visão, seguindo uma abordagem de visão ativa.
> Desenvolver uma arquitetura de interoperabilidade, responsável pela ligação do sistema de inspeção à cadeia produtiva, capaz de acompanhar o incremento de flexibilidade e adaptabilidade dos algoritmos de visão por computador e inteligência artificial.
Use Case: Inspeção de Objetos Deformáveis via Manipulação Robótica
Um dos objetos de estudo no âmbito do projeto foi a pele natural utilizada na indústria automóvel. A inspeção deste objeto implica duas etapas. A primeira etapa diz respeito à deteção de defeitos visíveis e adquiridos com a pele num plano. A segunda tem como objetivo a deteção de defeitos apenas visíveis com a manipulação da pele.
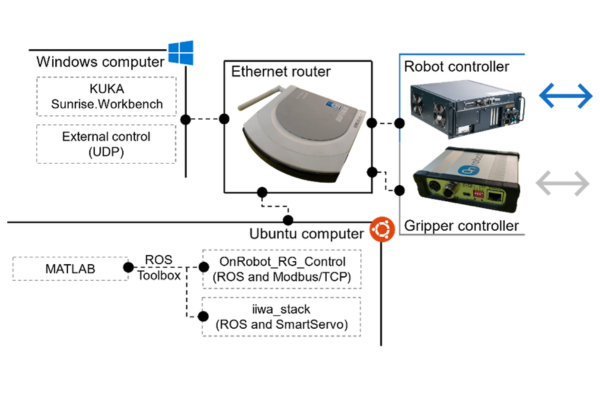
Fig1- Arquitetura da solução

Vídeo – Manipulação com robô com correções online
>https://www.dropbox.com/scl/fi/y94aigw53con6bk3jchfw/My-project-6-2023-10-02_15-27-02.mp4?rlkey=n0cmbvkvck9bskrlacqxg44mx&dl=0